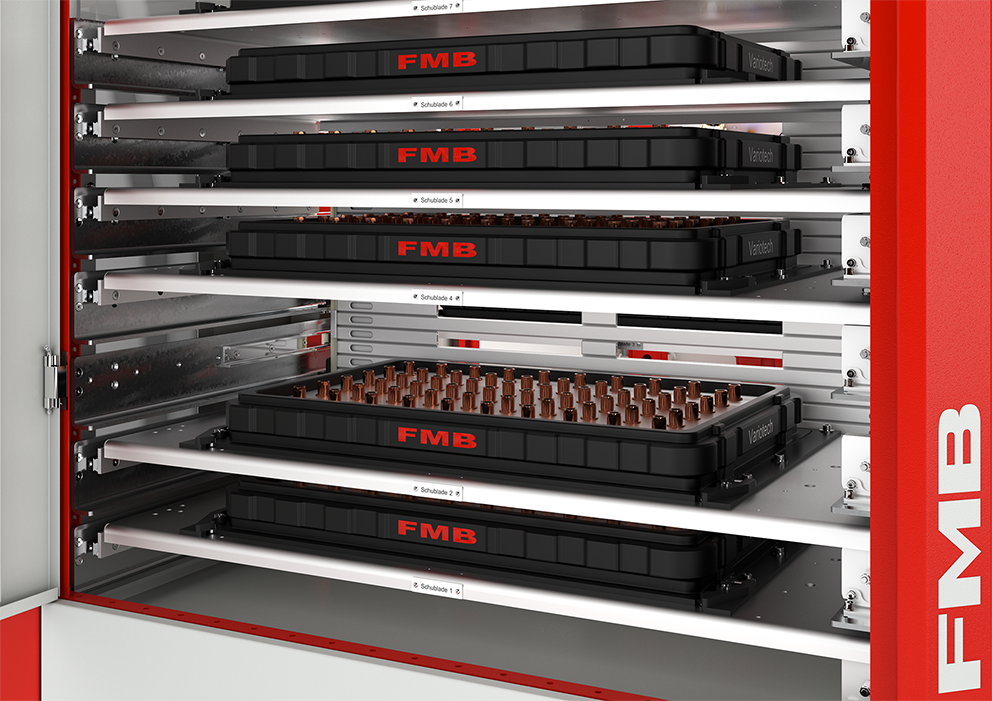
Die Rohteile werden in Werkstückträger eingesetzt und dem Handlingsystem über Schubladen zugeführt. Die Schubladen sind übereinander angeordnet und können von außen mit Rohteilen befüllt werden. Jeweils eine Schublade wird pneumatisch in Arbeitsposition gefahren, die dem Roboter dann zur Verfügung steht. Über das Schubladensystem wird der Werkstückträger wieder nach außen geführt und die Fertigteile können entnommen werden.