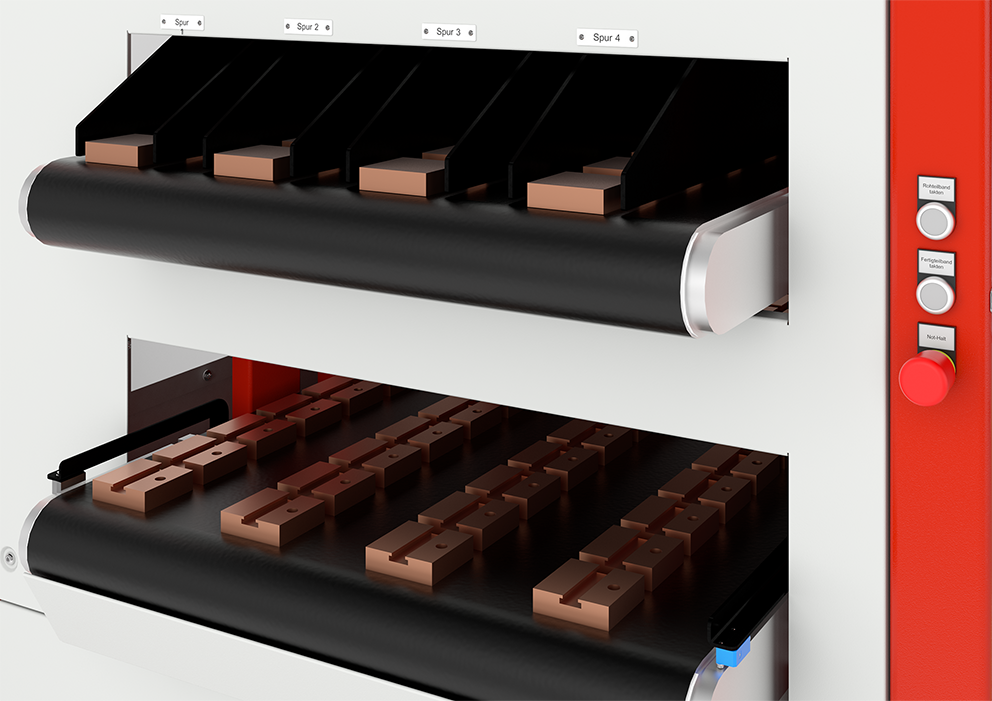
The automation cell is equipped with conveyor belts for feeding the raw parts and removing the finished parts. The operator places the raw parts on feed lanes and then automatically transports them to the automation cell. The robot removes the raw parts from one conveyor belt and places the finished parts on the other. As soon as the finished parts leave the automation cell, the operator can remove them.