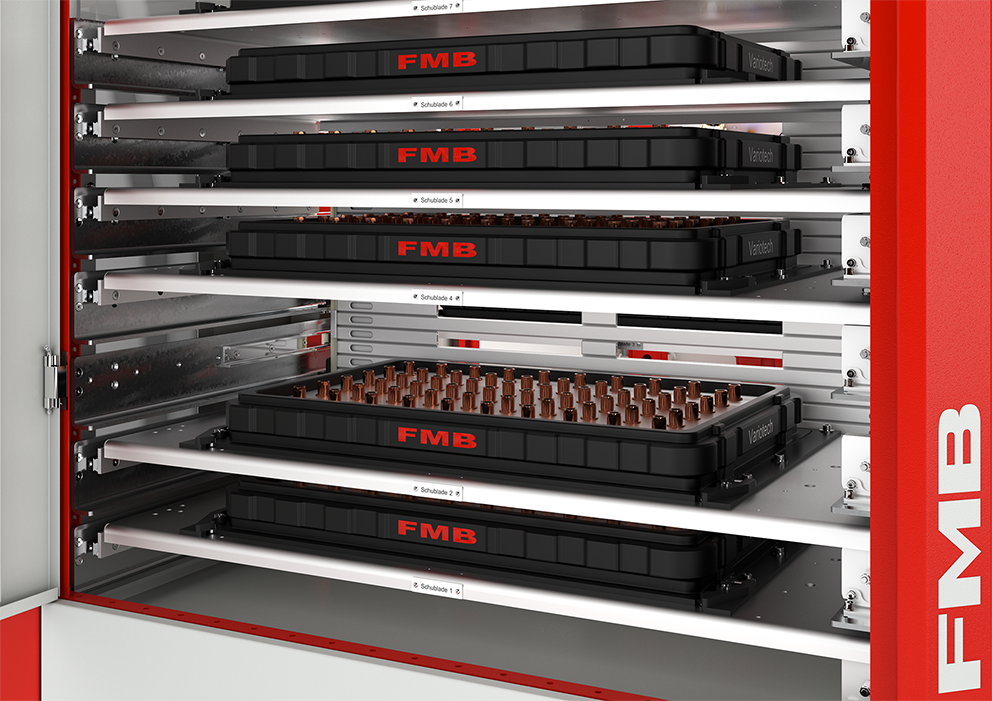
The blanks are placed in workpiece carriers and fed to the handling system via drawers. The drawers are arranged one above the other and can be filled with blanks from the outside. One drawer at a time is pneumatically moved into the working position, which is then available to the robot. The workpiece carrier is returned to the outside via the drawer system and the finished parts can be removed.